Controls. Designing and implementing a motion-control platform starts with selecting the right hardware. There was a time the choice was cut and dried: PLCs handled machine control and perhaps a few axes of motion, while anything more complex required an additional dedicated motion controller.
High-level algorithms are not enough to set the omnidirectional platform in motion. In order to function properly, the robot also needs a library of low-level algorithms that can send motion control signals to the motors, poll sensors and provide other important functionality. In the following chapters, these control algorithms will be addressed.
climbing trolley for material transferring, staircase climbing stretcher can be derived depending on the object built on the platform. [5] These platforms can also be useful in the buildings with lifts, particularly when power backup is unavailable. Several rehabilitation devices are currently available or in development.
The most likely cause of this is neglect of the effect of friction on the motion of the trolley. The gradient of the line may be correlated with 1/mass of the system (trolley and slotted masses). There is a variation of this experiment, in which the force is held constant but the mass of the trolley is altered by attaching further masses.
(v) The control for the bridge and trolley travel shall be so located that the operator can readily face the direction of travel. ( vi ) For floor-operated cranes, the controller or controllers if rope operated, shall autoally return to the “off” position when released by the operator.
Nov 13, 2021 · The planar motion of the platform is generated via excitation of the first bending mode of the corresponding plate using a single harmonic signal while the remaining plates operate as passive supports. The direction of the platform motion controlled by switching electric signal between piezoelectric plates.
Click here????to get an answer to your question ️ A (trolley + child) of total mass 200 kg is moving with a uniform speed of 36 km/h on a frictionless track. The child of mass 20 kg starts running on the trolley from one end to the other (10 m away) with the speed of 10 ms^-1 relative to the trolley in the direction of the trolley's motion and jumps out of the trolley with the same relative
Sep 24, 2021 · Developing the relay control circuit for the trolley. To accomplish this you require a variety of relays and diodes. The relays needs to be accurately rated that allows you to deal with the high power wheel motors of the trolley. I might suggest choosing OEN make relays for this, as proven the following image: 12V, 400 ohms, 10 amp relay
Nov 08, 2021 · With increasing frame difference time (33.3, 66.7 and 133.3 ms), the red, green and blue motion trolleys are gradually separated (the arrows represent the direction of movement), which
Dec 01, 1999 · INVERSE DYNAMICS CONTROL In this section, a procedure is described for the derivations of control laws ul and u2 such that the motion of the trolley could be steered to perform specified tasks. First, by introducing the following control law u = Lv + A, v = (vi, V2) ', (22) equations (20) and (22) yield d3*k = vk k = 1 2. dt3 (23) Dynamical Model 145 Note that equation (23) represent a controllable linear system [6].
Dec 29, 2017 · In Robotic-Mode an operator can use a remote control to move the robotic platform in any of the following methods: Joystick Control in a XY-Plane, Point to Point timed and synchronized preset positions, Key Frame motion through multiple points, record and playback motion, as well as Autonomous reFrame motion.
Trolley speed is the rate of motion that a motor operated trolley (and hoist) attains while traveling along a beam. TROLLEY SUSPENDED/ASME HST-4M. Suspension of hoist from a trolley. Hoist can be connected to trolley by hook, clevis, or lug suspension, or the hoist can be integral with trolley. TROLLEY TRAVEL/ASME B30-17
Dec 11, 2019 · 1. Motion control function: In order to realize the function of auto pick-up of the AGV handling trolley from the cargo receiving position to the loading platform, the AGV trolley control system can have the function of controlling its horizontal walking and position exact stop. 2.
Abstract: This article mainly introduces the motion control system of high-altitude live working vehicle and the design of the hydraulic drive system of the trolley. Motion control system is the nerve centre of auxiliary robot for power distribution without interruption. It plays a key role.
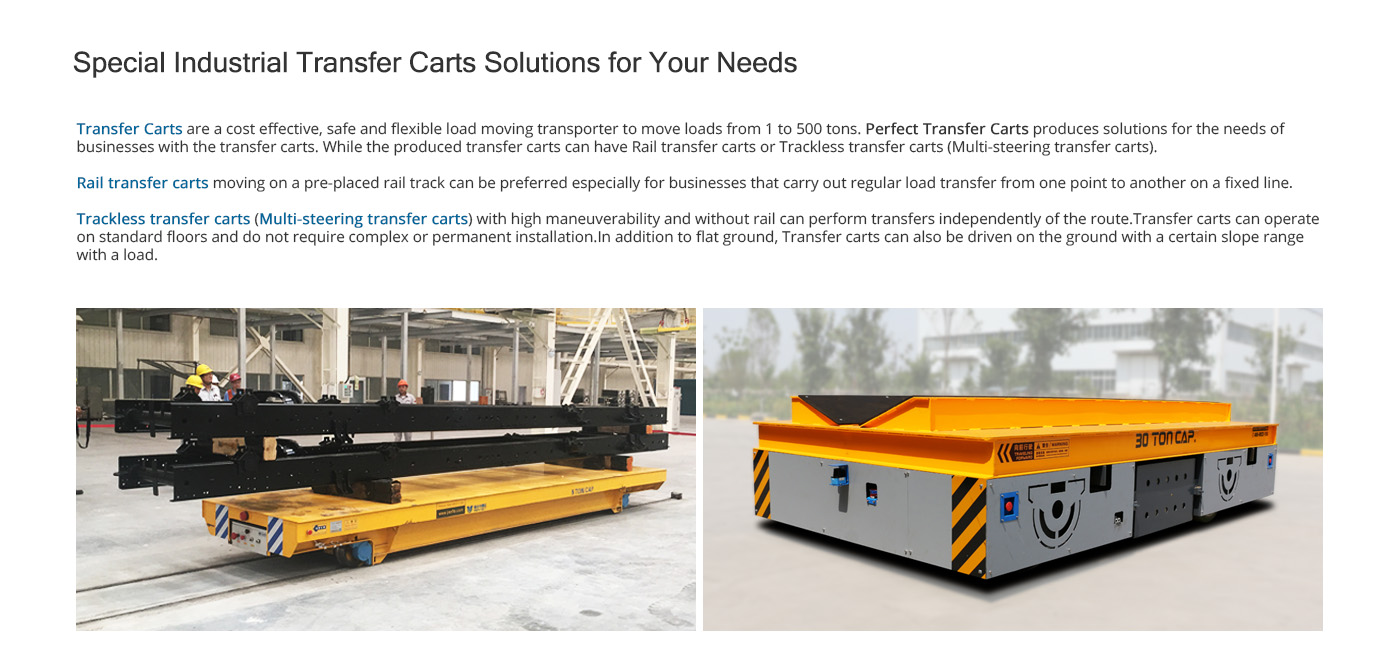
steerable transfer trolley for the transport of coils 30t Perfect AGV Transfer Cart provide program design, process flow design, standard and non-standard design for clients. China Customized 30t Capacity Die Transport Trolley on